Rover Part 6: He's dead, Jim. And new things
It has been a while since I posted about the rover project. Coding and building continued. I added a web-client and better control over WiFi based on a ROS XBOX controller module. Rover1 got a friend in the form of a Tello drone that would launch and (occasionally) land back into a 3D printed nest using Apriltags, cameras, and super bright LEDs. For prototyping silly ideas, Rover1 was awesome.

Rover1 is retired.
The gearbox on one of the wheel motors was turned into dust after a low speed collision with a wall. Finding a replacement for a part with no serial number is difficult. The online documentation provided a lead but the gearbox that I ordered turned out to have a different gear ratio. Around then I figured it was easier to just make a new Rover.
DIY Robocars and Rover2
Through work I met Chris Anderson (3DR, Wired Magazine, DroneCode) and he put me onto a group he had started called DIY Robocars. The basic concept of DIY Robocars is ‘build and race’ small autonomous vehicles. They have a warehouse nearby in Oakland and it looked like an awesome community. For Rover2, I would aim to make something I could take to a meet, starting with a build using an existing project and making modifications along the way. Donkey Car gives a nice RPi image for adding autonomy to a standard RC platform. I also really like the simplicity of their approach:
camera stream -> neural network -> steering angle.
They have everything laid out for maximum customisation; change the neural net, add more sensors, add more outputs, it’s all python and C++ and nicely documented.
Rover2 Hardware
I sourced a Redcat Racing Blackout XTE RC truck: waterproof with brushless motors, independent suspension, big chunky wheels and lots or room to build on. The 3D printed chassis provided by Donkey Car was not compatible and I have little patience for 3D printing anyway. Laser cutting work here and is faster. I stayed late one evening in the makerspace and put this together:
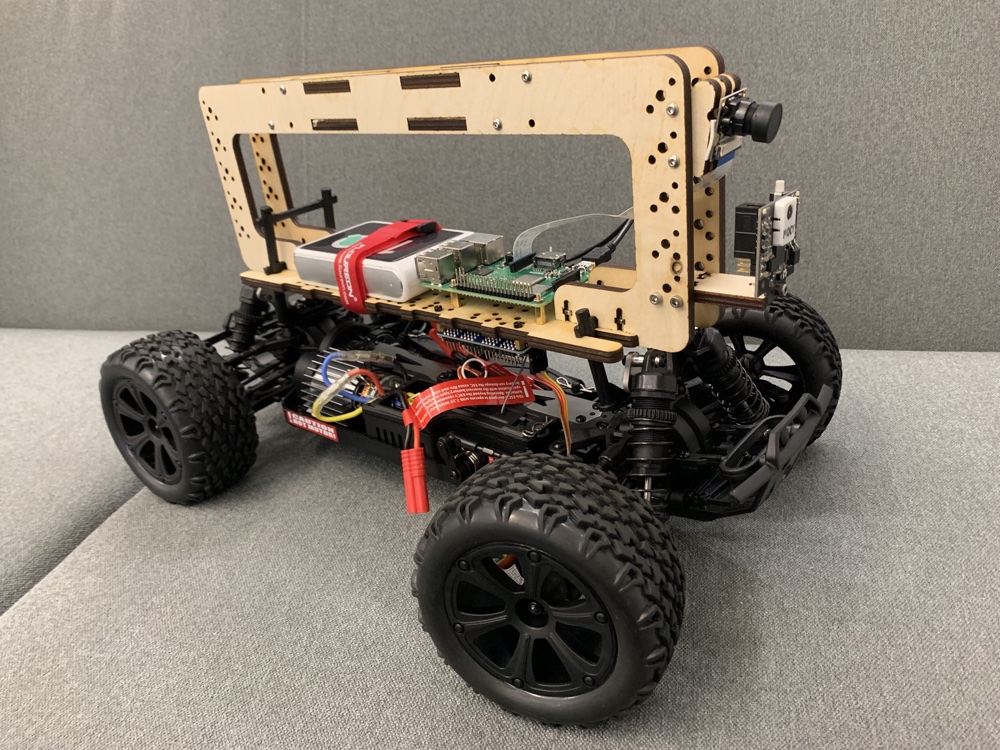
It’s Alive
Using the un-modified Donkey Car software I can drive it around with my phone and gather training data. I was able to offload the data to my mac and train a ‘neural pilot’ that can navigate the hallway I was testing in fairly OK (only made one dent on the wall). At the lowest speed setting, Rover2 is still sorta fast! STLs for the chassis are here.
What’s next?
Looking forward I would like to start messing with the code - racing is cool but I think a follow bot might have some utility also. But we are moving to Boston so it may have to wait until I find a decent and safe test location. My partner just got into a post-doc program at Boston Children’s (she’s so smart!) and I will be working remote and deep diving into some of the flying robot stuff I have been investigating with MIT. Should be cool :-D