Rover Part 2: Parts List Update
In my last post I talked about robots and made a parts list for Rover1. I wasn’t fast enough on the Raspberry Pi 3 preorder and thus my order has been delayed, but everything else has turned up!
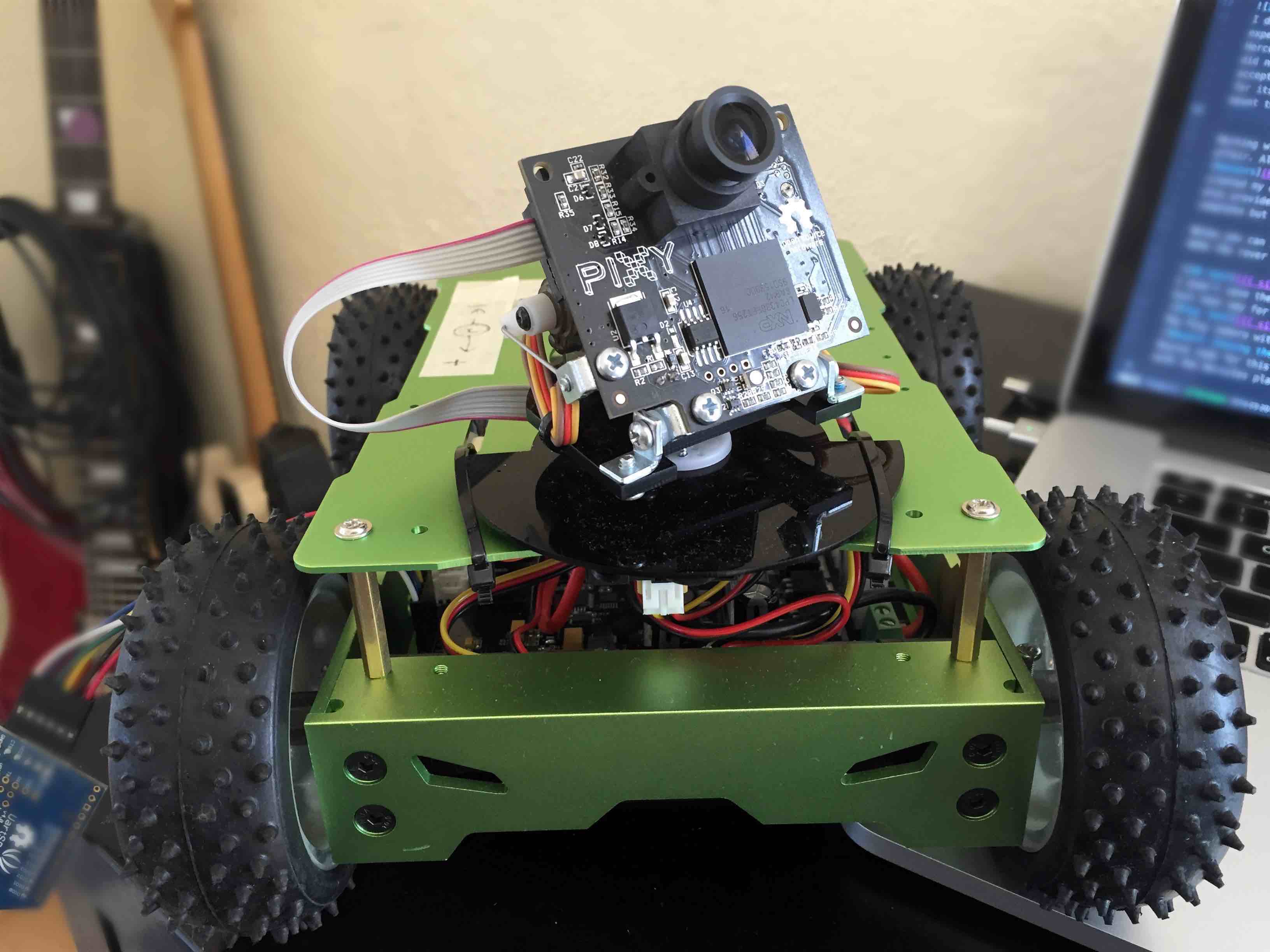
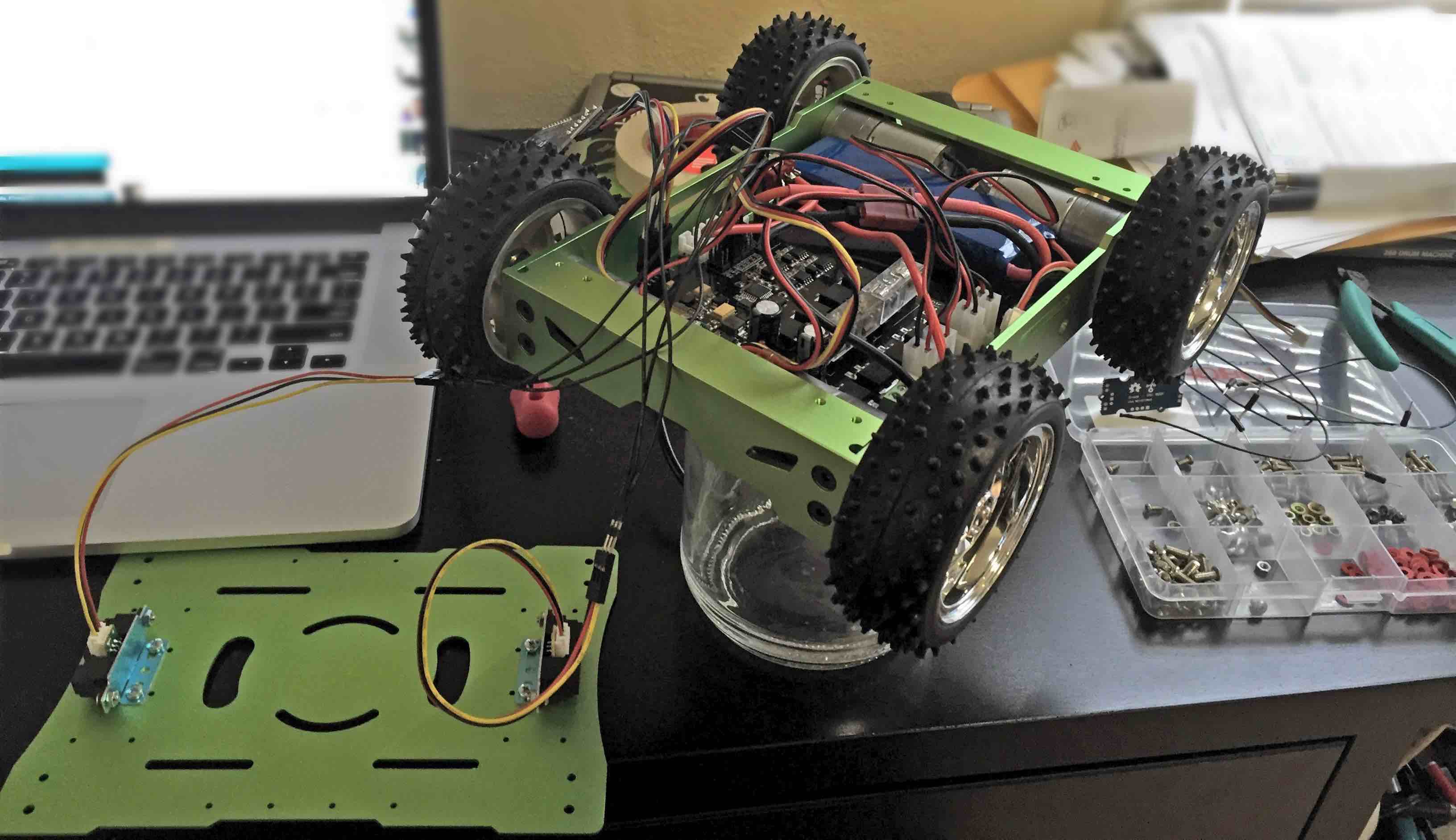 I don’t want to spend too much time reviewing components as it is more fun playing with them! The Pixy Camera is great fun and works in lower light than I expected. The Pan and Tilt kit is a little delicate during construction but works very well once it is all together. If you are looking for a review of the Hercules platform thumperthoughts, has written a great article. I should note I did not encounter the faulty Hall sensor issue mentioned in the thumperthoughts article and my battery charger came with a US plug. Build quality of all components has been acceptable and I have not encountered any manufacturing issues. I made a rookie error and ordered the wrong size of screws. The Hercules platform uses M3 screws for its construction and thus I assumed the additional mounting holes on the chassis would be M3. Alas, they are M2 which means I ended up using cable ties to mount the Pixy camera. The Pixy mounting options are imperial anyway.
I don’t want to spend too much time reviewing components as it is more fun playing with them! The Pixy Camera is great fun and works in lower light than I expected. The Pan and Tilt kit is a little delicate during construction but works very well once it is all together. If you are looking for a review of the Hercules platform thumperthoughts, has written a great article. I should note I did not encounter the faulty Hall sensor issue mentioned in the thumperthoughts article and my battery charger came with a US plug. Build quality of all components has been acceptable and I have not encountered any manufacturing issues. I made a rookie error and ordered the wrong size of screws. The Hercules platform uses M3 screws for its construction and thus I assumed the additional mounting holes on the chassis would be M3. Alas, they are M2 which means I ended up using cable ties to mount the Pixy camera. The Pixy mounting options are imperial anyway.
 Working with the Hercules Motor Controller is essentially the same as working with an Arduino and thus connecting and reading from the sensors was a painless affair. All sensors came with suggested software libraries and example code. I created a c++ sensors class to read from all sensors and store all data in the same format. I created my own simple 3D vector data type for the sensor data. This data type simplifies a lot of the maths and allows me to treat the x/y/z data as a single entity. It also provides methods to communicate this data via USB. A python class handles communication on the Raspberry Pi side. My code is nowhere near complete but you can have a look at the source code over here. Suggestions are always appreciated!
Working with the Hercules Motor Controller is essentially the same as working with an Arduino and thus connecting and reading from the sensors was a painless affair. All sensors came with suggested software libraries and example code. I created a c++ sensors class to read from all sensors and store all data in the same format. I created my own simple 3D vector data type for the sensor data. This data type simplifies a lot of the maths and allows me to treat the x/y/z data as a single entity. It also provides methods to communicate this data via USB. A python class handles communication on the Raspberry Pi side. My code is nowhere near complete but you can have a look at the source code over here. Suggestions are always appreciated!
Below you can see some test runs of the rover. I tested the IR sensors with a simple random obstacle avoidance program and had fun using the Pixy camera to make the rover chase a bright pink paper clip around.
 I didn’t save the IR navigation source code but I can summarize it: ‘drive forwards until you think you are going to bump into something then choose a random direction and turn that way for a random amount of time before driving forwards again’
I didn’t save the IR navigation source code but I can summarize it: ‘drive forwards until you think you are going to bump into something then choose a random direction and turn that way for a random amount of time before driving forwards again’
 The Pixy camera with the Pan and Tilt kit is really cool. I am pretty sure it was designed for Tony Stark.
The Pixy camera with the Pan and Tilt kit is really cool. I am pretty sure it was designed for Tony Stark.
 Source code for the object chasing/tracking function was taken from a great adafruit tutorial and quickly hacked to work with the Hercules platform (they say it shouldn’t work with Atmega 328-based processors but I had no issues).
Source code for the object chasing/tracking function was taken from a great adafruit tutorial and quickly hacked to work with the Hercules platform (they say it shouldn’t work with Atmega 328-based processors but I had no issues).